Team Lead, Avionics & Integration
Orchestrating the seamless fusion of hardware and software for a high-performance autonomous aerial system.
Mission Brief
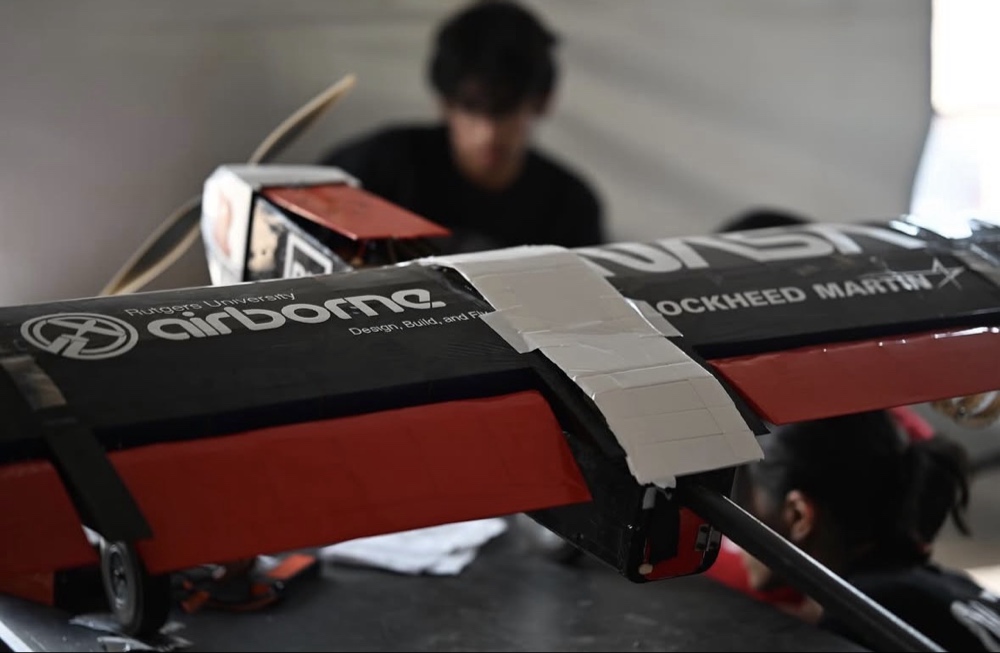
The Daedalus project was a high-stakes, rapid prototyping challenge to design, build, and fly a competitive aerial vehicle under extreme constraints. As the Team Lead for the Avionics and Integration team, my primary role was to architect the aircraft's central nervous system. This involved not only selecting and integrating all electronic components—flight controller, ESCs, motors, and telemetry—but also validating system performance against aggressive targets. A core challenge was the discrepancy between theoretical performance models and real-world metrics. My data-driven approach, using a custom-built thrust stand, was instrumental in proving our aircraft's superior capabilities and securing a winning edge.
Core Metrics
Validated T/W Ratio
1.46
Exceeded eCalc models by 40%
Cruise Speed
80 m/s
Projected, based on thrust data
Peak Current
130A
Zero critical failures during high-load
Gallery

Custom Thrust Stand
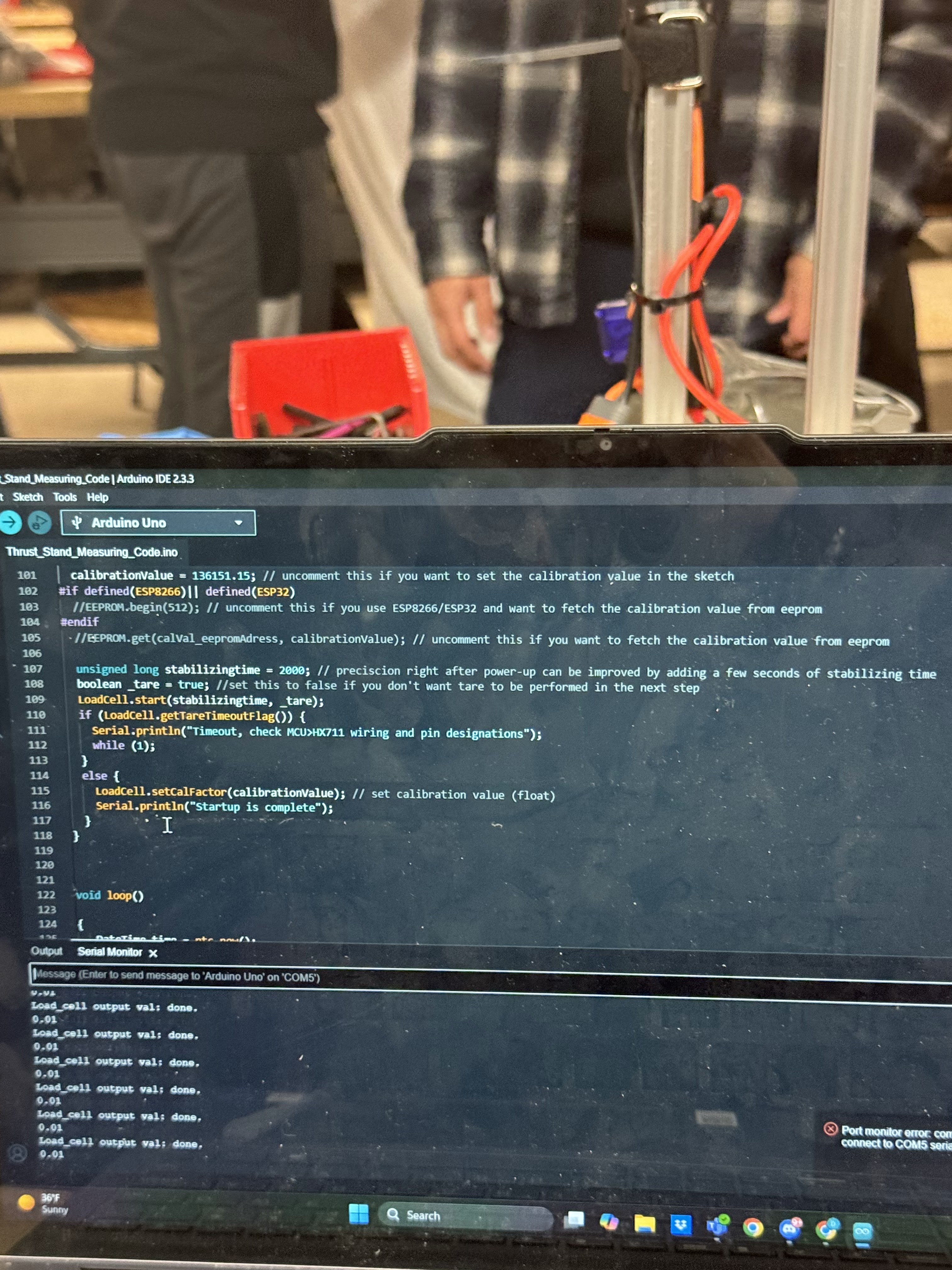
Data Acquisition Unit